Bluetooth hardver
A robotautó mozgását nagyon sok tényező befolyásolja. Egy Y megfordulásnál a motor sebessége, a mozgások ideje lényeges, és nehezen beállítható. Ezért úgy döntöttünk, hogy felrakunk egy HC-06 bluetooth egységet, amit androidos telefonról tudunk vezérelni. Így a telefonon könnyen állíthatók a sebesség, és az idő adatok, és mellesleg távirányítónak is megfelel.

A HC-06 bekötése nagyon egyszerű, csak arra kell figyelni, hogy az RxD, és a TxD lábai 3,3V-os jelet kezelnek. A tápfeszültség viszont 3,3-6V között lehet, így az 5V-os tápfeszültség megfelel.
Az ARDUINO TxD kimenetének 5V-os feszültsége károsítaná a HC-06 RxD bemenetét, ezért ott egy feszültségosztót alkalmazunk. Az ajánlott 1K - 2,2K feszültségosztó helyett 3 db 10K ellenállást építettünk be, és tökéletesen működik.
Az ARDUINO 0-ás, és 1-es portja egy hardveres soros port, amivel a legegyszerűbb a soros kommunikáció a HC-06-al.
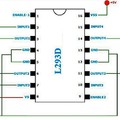
A képen (kinagyítható) látható a teljes kapcsolás.