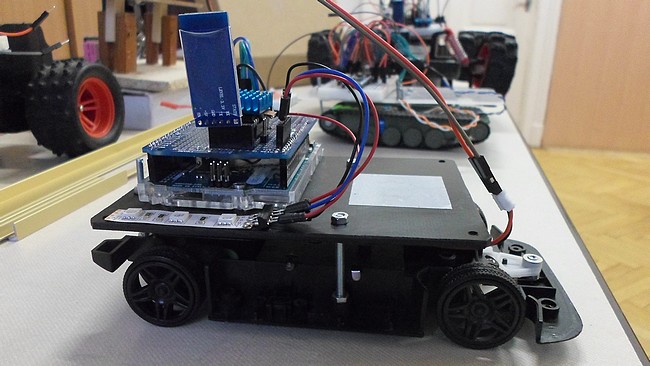
Egy kis látványelem is került a robot platformra. Egy RGB ledszalagból 3 db LED került minden robotra. A vezérlése nagyon egyszerű:
A +12V-os kivezetést az akku 7,2V pozitív kapcsára kötöttük. Ekkora feszültséggel még éppen világít a LED. Az RGB kivezetéseket az AUDUINO 3,5,6 -os portjára kötöttük. Ezek még szabadok voltak, és ezek PWM vezérelhetők. A portra kapcsolt 0 jelre világít az adott színösszetevő, illetve PWM jellel "analog" módon is keverhető a szín.
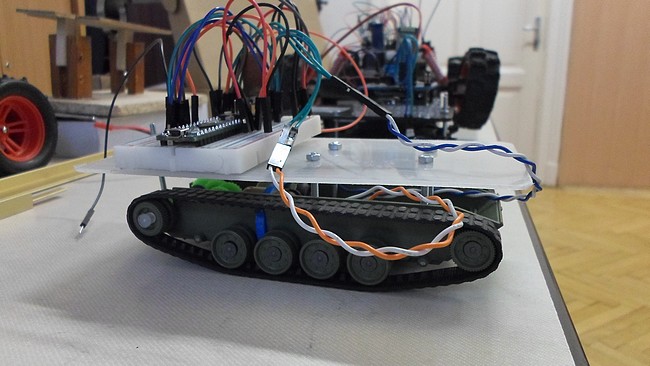
Lassan kialakulnak a platformok, amelyek alkalmasak az ARDUINO-s vezérlésre. Mechanikai problémákat kellett megoldani, mivel a távirányítós autók kormánya nem erre a célra lett tervezve. Gyakran nem állt be egyenes irányba, hiába vettük le a kormány motor vezérlését. Sikerült egy 2 motoros tank platformot is összerakni, aminek az irányítása talán könnyebb lesz.
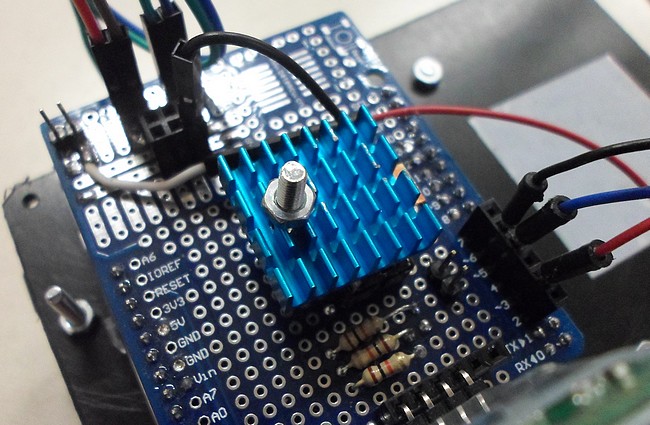
A másik probléma az L293D vezérlő melegedése. A PDF dokumentációja szerint a GND lábait egy nagyobb rézfelületre kellene forrasztani, és azon keresztül adja le a hőt, ami a nagyobb áramoknál keletkezik. Mi viszont próbapanelbe csatlakoztattuk, ezért a GND lábakat felhajlítva egy kisebb réz lemezt forrasztottunk rá. Erre a lemezre csavaroztuk a hűtőbordát.
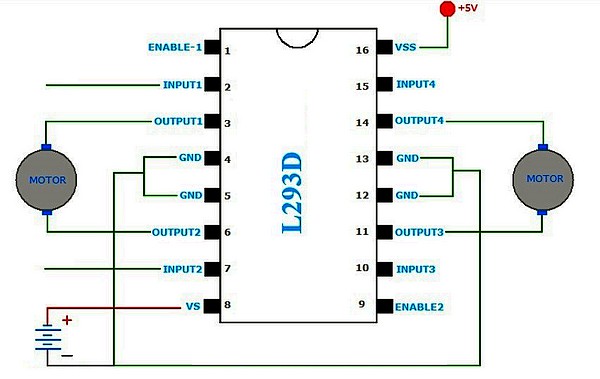
A robot teljes vezérléséhez mindkét motort előre, és hátra is kell forgatni, sőt a sebességet sem árt módosítani. Erre a feladatra találták ki az L293D áramkört, ami egyszerre 2 motort is képes vezérelni.
A rajz alapján kötöttük be a motorokat. Az output1-2 kimenetre került a hátsó meghajtó motor, az output3-4 kimenetre az első kormányzó motor.
Az enable1-re kapcsolt 5V-os jel engedélyezi a hátsó motort, illetve az input1-2 jelek adják meg a forgásirányt.
enable1
input1
input2
működés
0
x
x
áll
1
0
0
áll
1
1
0
egyik irányba forog
1
0
1
másik irányba forog
1
1
1
nem javasolt állapot!
A motor sebessége lassítható, ha az enable1 jelre egy PWM jelet kapcsolunk. Minél nagyobb lesz a PWM jel kitöltési tényezője, annál gyorsabban forog a motor. Az első teszteknél kiderült, hogy a kormányzás motorjának maximális feszültség kell, így ott nem használtunk PWM jelet.
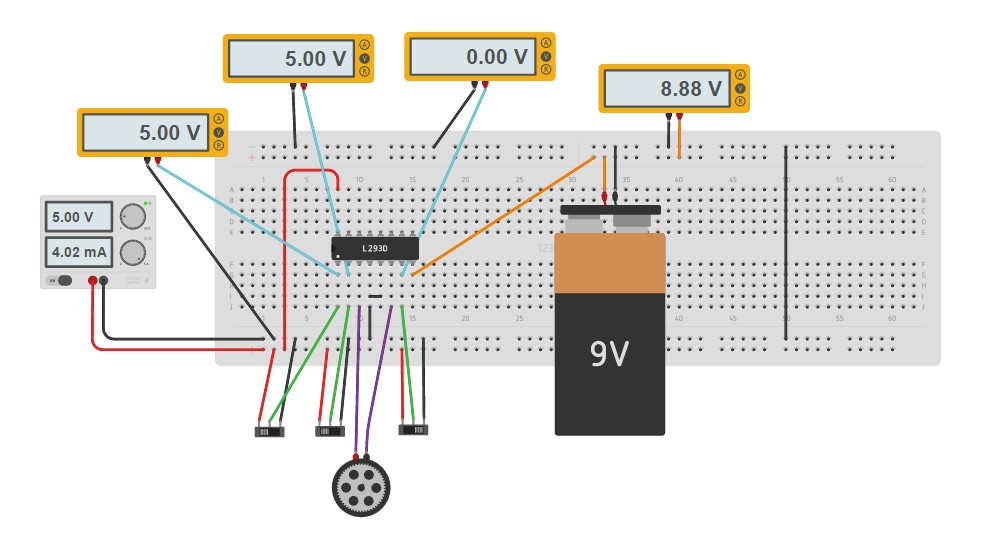
Az első teszteket ARDURINO nélkül, a próbapanelen végeztük el. Nagy segítség a https://circuits.io oldal, ahol ingyenesen megépíthető, sőt szimulálható is egy áramkör virtuálisan!
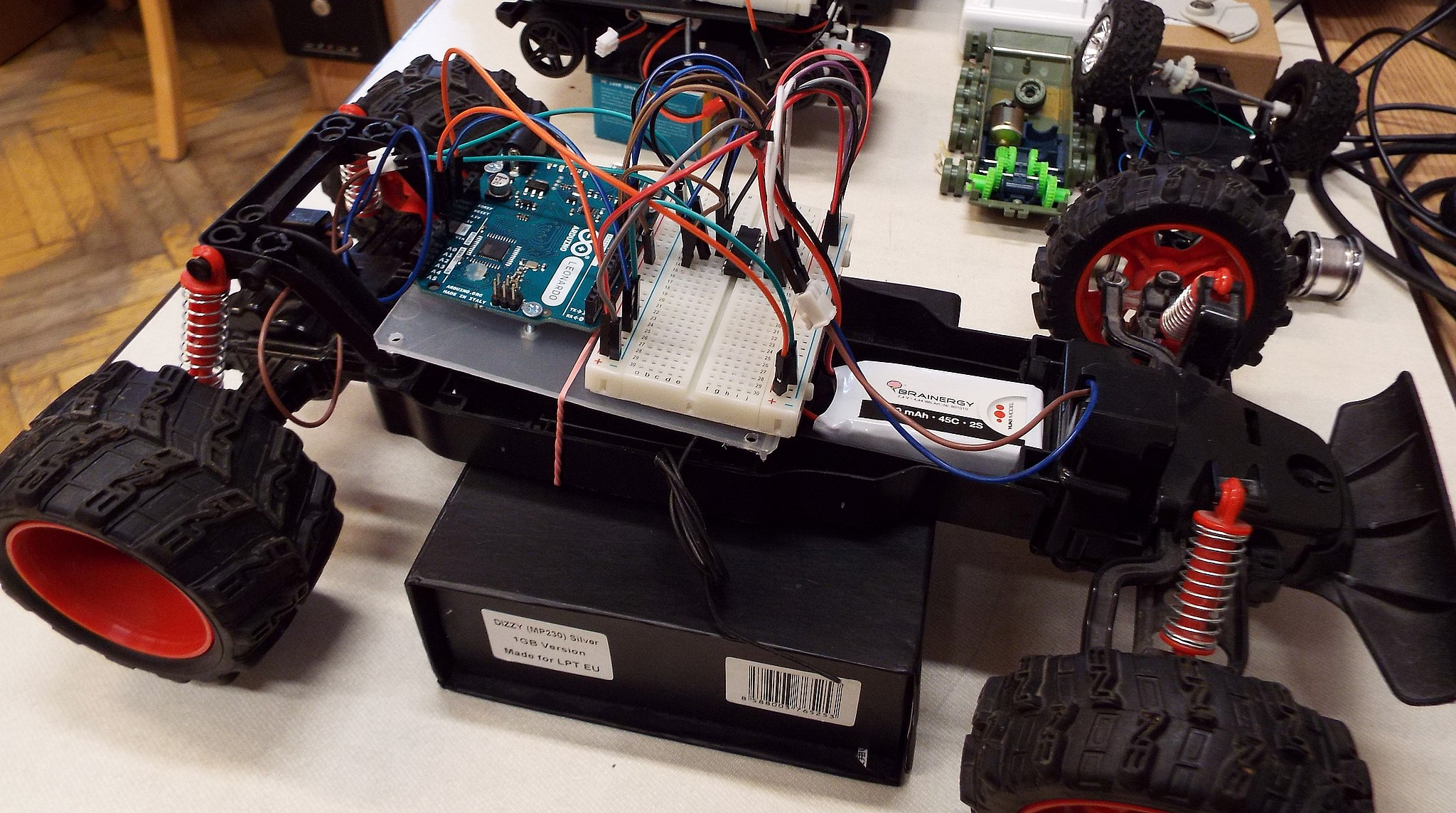
Egy komplett robot platform nagyon drága, ezért a költségek csökkentése miatt régi, kidobásra ítélt RC autókat használunk a meghajtásra. Ezeknek csak az alváza kellett a motorokkal, mivel mindent az ARDUINO panel vezérel majd.
A központi vezérlő egy ARDUINO LEONARDO, ami kompatibilis az UNO-val, illetve a többi verzióval is.
Fontosnak tartottam, hogy a gyerekek építsék fel a teljes áramkört, ezért univerzális próbapanelt használtak. A két DC motor vezérlését egy L293D motor meghajtóval tudtuk megoldani.
A későbbiekben terverünk még szenzorok felszerelését is, illetve látványelemeket.
A szentesi Kiss Bálint Református Általános Iskolában több informatika szakkör is működik. Itt fedeztem fel néhány tehetséges tanulót, akik az átlagosnál is jobban érdeklődnek a programozás iránt.
Nekik külön tehetséggondozó foglakozást tartok hetente 1 órában. Az iskola, és az iskolai alapítvány anyagi támogatásának köszönhetően sikerült beszerezni 3 készlet ARDUINO mikrogépet, amelyek tetszőleges feladatra felprogramozhatók.
Az első nagyobb feladatunk 3 db robot autó készítése. Ebben a blogban a fogalakozások összefoglalóit, a technikai megoldásokat, és a kódokat is megosztjuk.